STIG B-II Mission Report

STIG B-II Mission, Saturday November 3rd 2012Update by Neil Milburn, posted 02/27/2013
The preparation, packing and travel to NM was uneventful. We appear to have the NM border crossing situation under control now and although it takes anywhere up to an hour to get through the Port of Entry, it is at least a formality. We followed the same two day preparation routine with a dry run on the Thursday afternoon and Friday being final preparation and MRR at the NMSA offices. Thursday we had to drill new holes for the launch stand stool to accommodate the rotation required by the IMU problem encountered on the STIG B-I mission.
The seemingly simplest solution to the IMU problem on STIG B-I, rotate the IMU 180-degrees, was impractical because of the tight layout of the bulkhead on which it was mounted.

The next simplest solution was to rotate the launch stand through 180-degrees which necessitated drilling new holes for the launch stool.

The day of launch we departed the base camp hotel at 6:15, slightly later than the STIG B-I mission to account for the later sunrise, and arrived on the pads at 7:30. The early morning desert temperature was in the low 50’s and the winds had picked up slightly from prior days as a front approached. This would cause more concerns as launch time approached.

Preparation for the launch was uneventful and we rolled out to the launch pad just before 10:00 am. Launch preparations went smoothly with just one stand-down prior to propellant loading until we acquired satisfactory GPS readings. The satellite constellation was sitting low on the western horizon and likely shielded by the body tube. The following graphic does not show the actual satellite constellation at time of launch, but is typical of the information that we review prior to launch.
The biggest concern was the wind which had picked up substantially during the launch preparations and rather than the usual dead calm we had become used to, the winds were steady 8-mph with occasional gusts to 13-mph. Although our flight rules limit us to winds of <20-mph, we had arbitrarily set an upper limit of 10-mph for the early missions until we better understood our limitations. As launch time approached, the winds did subside slightly with steady 5-mph and gusts to 10-mph; we decided that this was acceptable and launched at 10:30 a.m.




The lift-off and launch stand retraction was nominal but it was immediately evident that there was a slight slow rotation and, more importantly, the vehicle appeared to be drifting slowly to the NNE which was the direction the winds were approaching from at ground level.
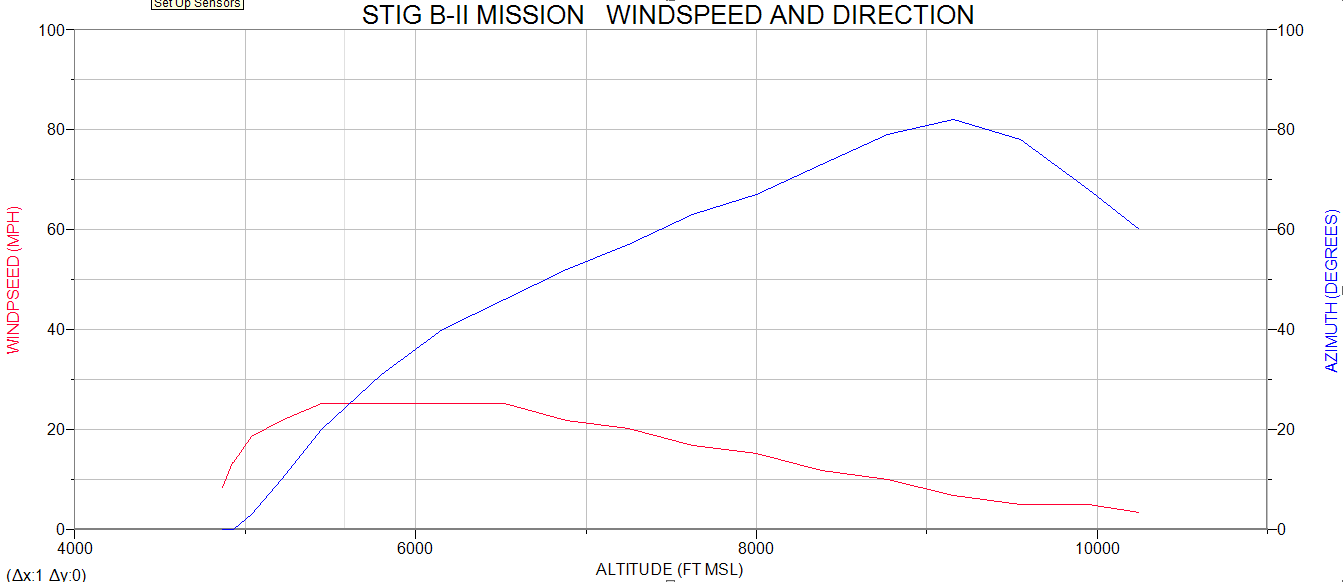
The vehicle was weather cocking into the wind and as the altitude increased, the winds also increased. Had the vehicle succeeded in gaining any significant altitude, the winds swung around clockwise until we reached the jet stream which was from the more traditional westerly direction.
The vehicle shut down early on what turned out to be a "dry line" signal. This is from a sensor that we have in the fuel line just as it exits the tank. Its purpose is to shut down the engine if we run out of fuel first so that the engine does not self-cannibalize by burning stainless steel in pure oxygen!
Obviously we had not run out of propellant this early in the boost phase and typically, based on prior experience, any bubble trapped near the sensor is cleared out as soon as the engine starts. Later analysis showed that the set-point for fuel depletion was too close to the bottom end of the operating band. For just a couple of bits, the sensor voltage value dropped below the set-point and the flight computer triggered a shutdown ... just as it should.
The fix for this problem was to put some different resistors into the sensor package to change the safe operating range. This was preferable to changing the set-point because doing so required a code change which in turn would mean repeating all the verification tests!
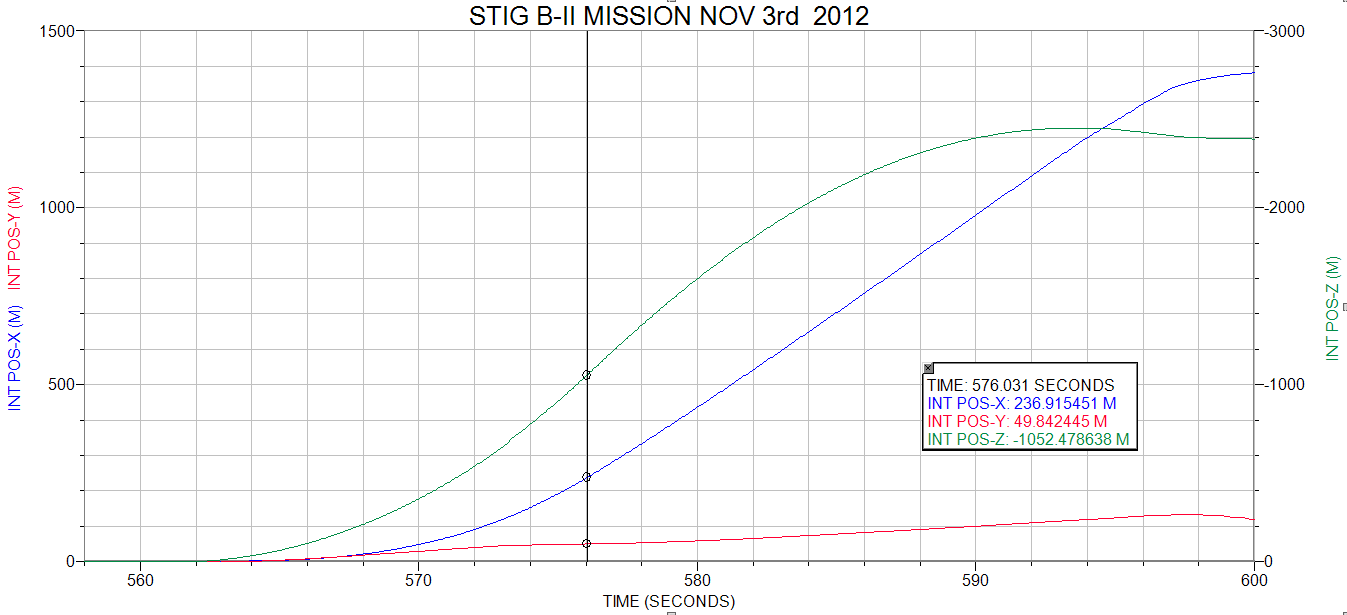
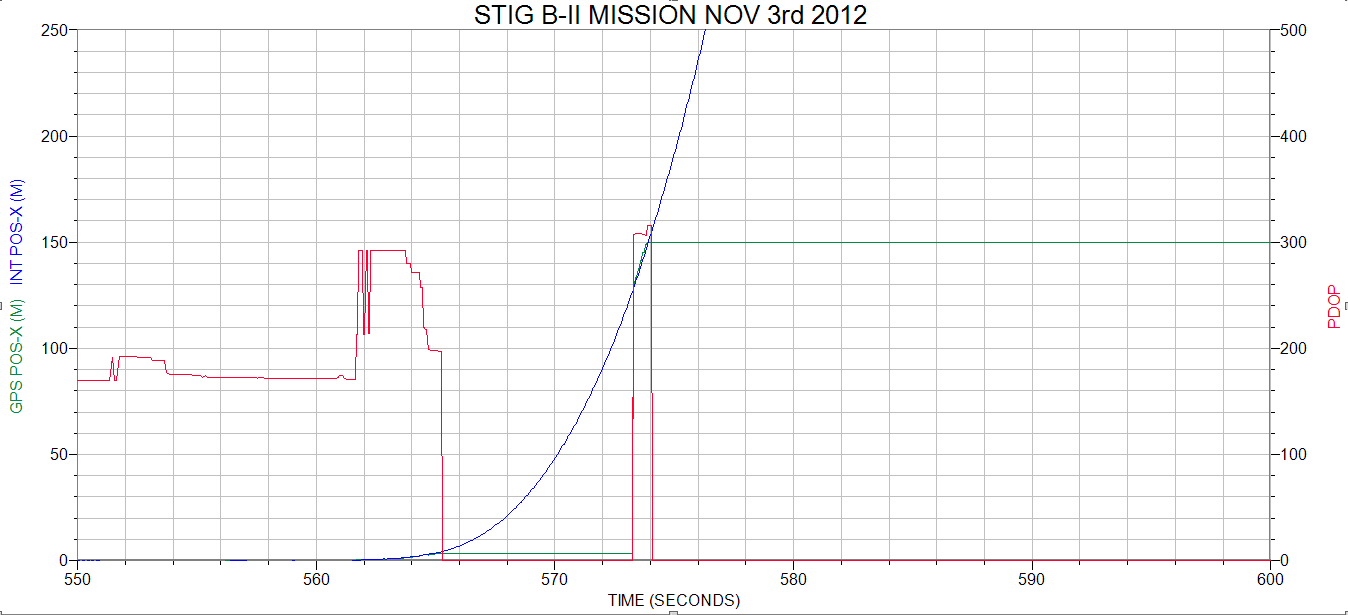
The graph below shows the position from integrated IMU data (GPS did NOT work well!) and the data point shown is at MECO caused by the dry line signal. INT POS-Y is the vehicle’s N-S axis at launch and INT POS-X its W-E axis. However, the vehicle had rotated 73-degrees during this same period (CCW looking down on the vehicle) so its location was 244-m at an azimuth of ~29-degrees.
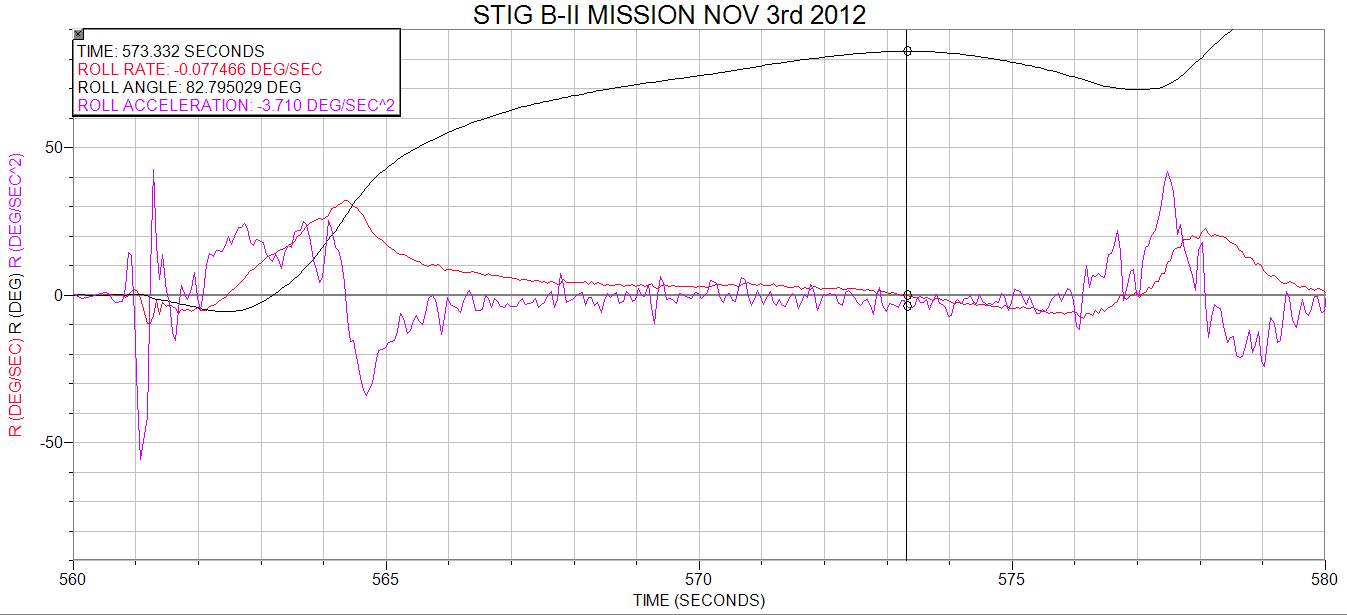
At lift-off there was a slight rotation CW (looking down) but then a slow roll CCW which peaked at a rate of 30-deg/sec before slowing to a stop at an extreme rotation angle of 83-degrees and then a reversal. There is no way of knowing if this was an inertial oscillation or due to aerodynamic forces. However, it would seem that a full duration burn should not see any significant roll triggering an ACS response.
Our flight rule roll limit before abort is 360-degrees/second (set within the operating range of the KVH IMU). However, we do not want to use helium during the boost phase to fight aerodynamic induced attitude effects, but rather conserve it for the coast phase during which only inertial effects have to be overcome. Therefore, the roll thrusters only operate during the boost phase to counter gross roll and not to null it out.
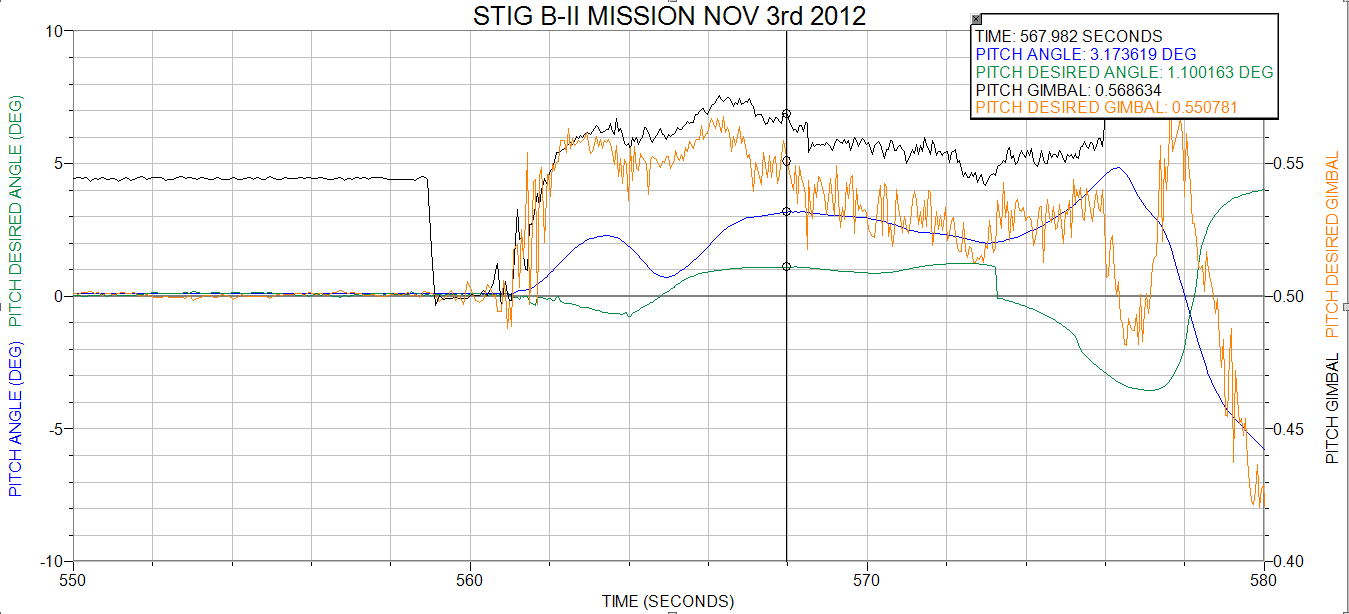
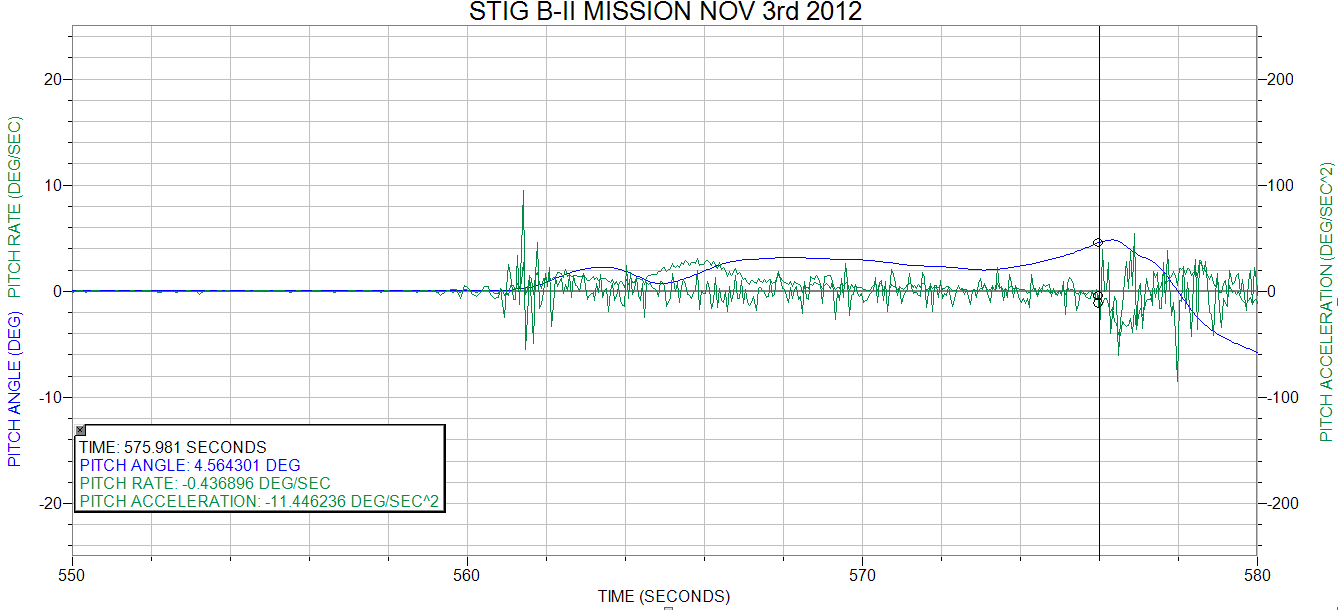
The following four graphs for pitch and yaw are based on the vehicle IMU’s Y-axis being North-South / Pitch and X-axis West-East / Yaw. The first graph in each series is the angle and desired angle (as determined by the flight computer) and the second graph in each series is the angle, angle rate & angle acceleration.
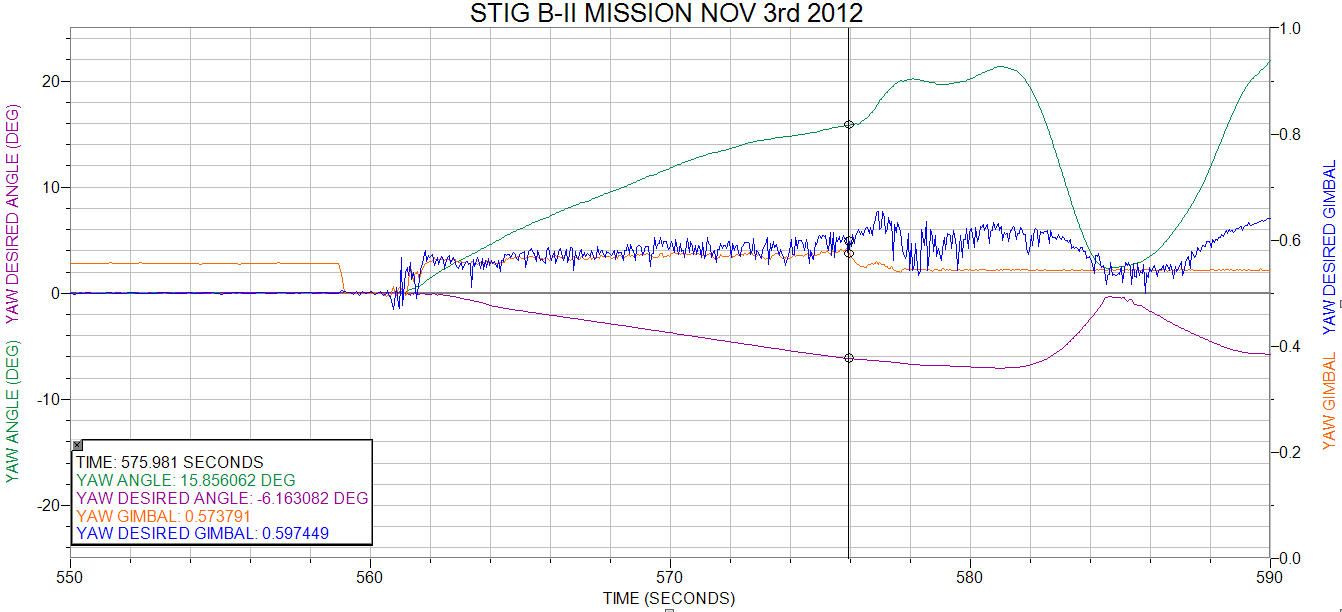
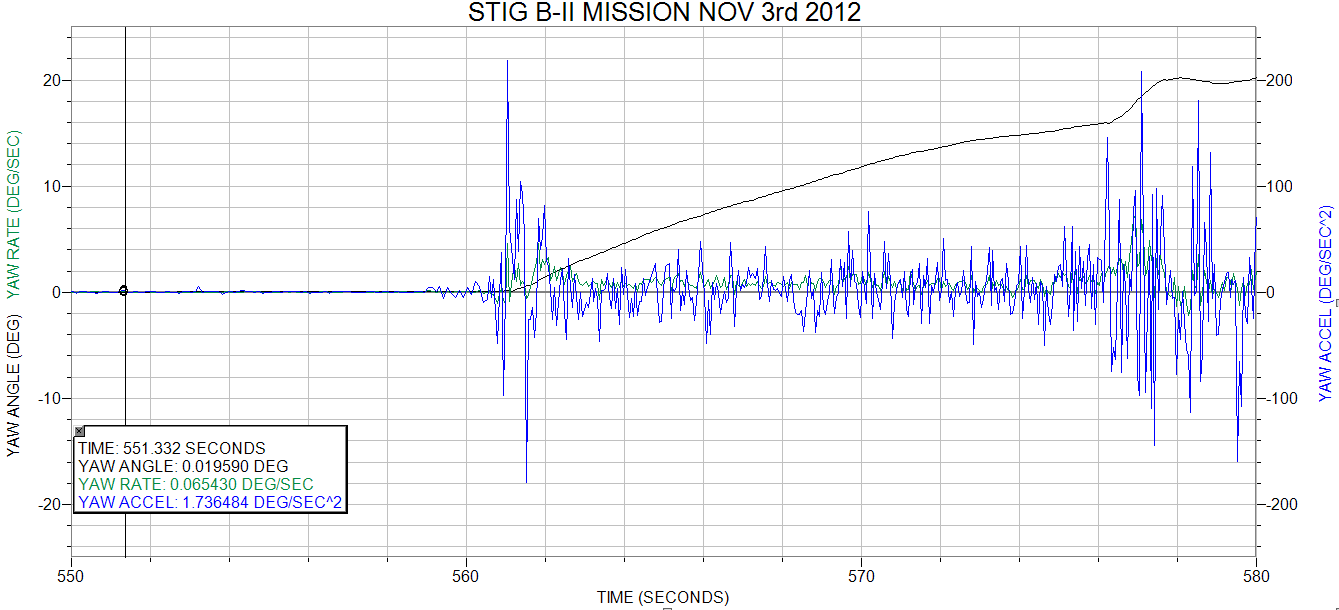
The yaw angle situation is much worse and would have led to a shutdown on ground velocity (imminent) and/or IIP had not a dry line been triggered before that. Again, the requested response appears to be in the correct direction but without sufficient control authority to halt the yawing moment. The yaw rate is decreasing through the boost phase (more clearly seen from the yaw angle curve than the noisy rate curve) but it is never reversed resulting in a significant yaw angle and, consequently, a large displacement and velocity in that direction.
Actually, saying that it did not have sufficient control authority is not strictly true. The engine has more than ample control authority but, as we determined later, the gain values in the control algorithm were too low resulting in a sluggish response. It was trying to do the right thing, just not with enough "oomph".
If the dry line sensor had not triggered the premature MECO, it would have only been a temporary respite because the inexorable drift would have triggered a shutdown on IIP maximum range or groundspeed flight rules as previously noted.
One major issue that needs to be addressed before return to flight is the GPS. At launch initiation it drooped initially and then, after only four seconds, dropped off totally before recovering momentarily eight seconds later but then only for one second. The GPS location in all three axes was still correct based on the IMU coasting value; see GPS POS-X and INT POS-X below. However, had the GPS not recovered momentarily when it did, we would have had an even earlier shutdown on “shutdownGps” after a 10-second LOS.
The GPS antenna is down inside the recovery section and is shielded to some extent by the recovery module tube and, in one direction, by the main chute bag. Its field of view is through the top of the rocket and the nose cone. We determined to assess the location and/or the possibility of dual antennas.
The operating pressures appeared to be nominal throughout with good initial HP helium tank pressure of 4800-psig after initial ullage pressurization and igniter test. However, we decided that on future missions we would pump the high pressure helium tank up to about 5,200-psig so that on launch, after all purges, igniter tests and pre-pressurization of the tanks, we would be starting with 5,000-psig bulk helium pressure to prolong the regulated burn time and delay the onset of blowdown operation.

The GroundSpeed was increasing in rate and, had the vehicle not shut down on dry line, it would have shut down on this parameter less than one second later.
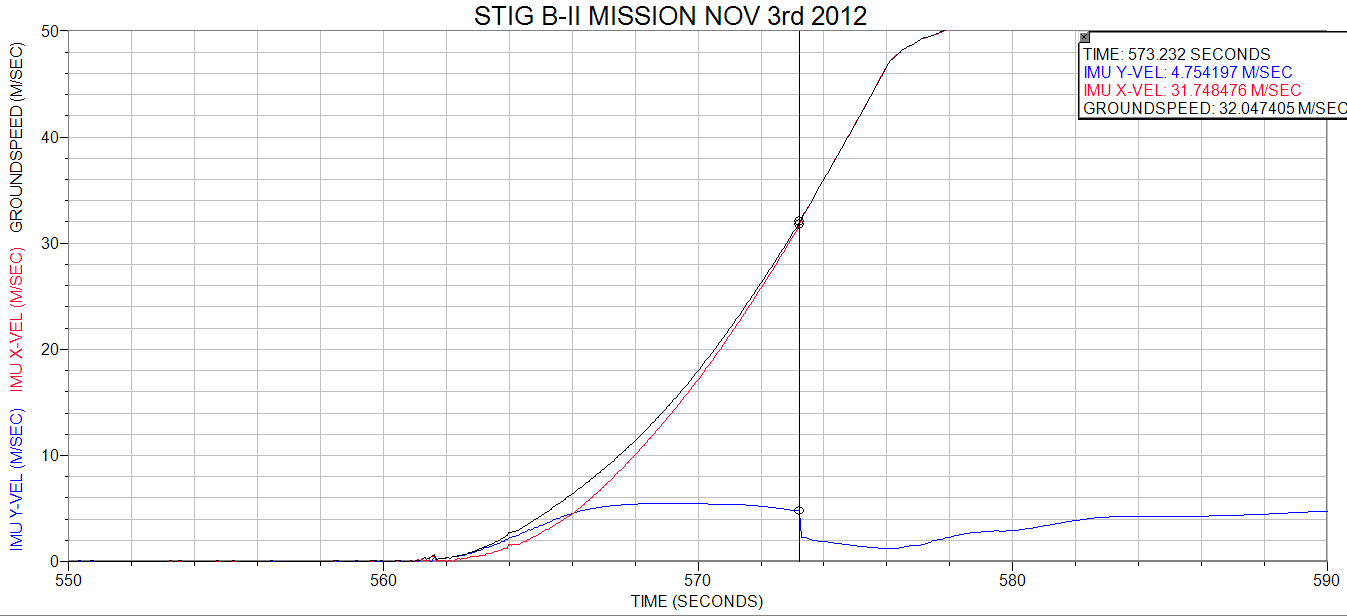
The ground speed is due almost entirely to the velocity in the yaw direction, as one would expect. The rapid inflection point in the pitch direction velocity is at the exact moment the GPS is briefly reacquired.
From here on it appeared that we were going to be watching a repeat of the STIG B-I mission. However, this was not to be. Despite the orientation of the vehicle at apogee, the ballute and nose cone deployed successfully, yet again proving the rugged design under adverse conditions.
The main did trigger on cue though and the Wamore guidance system brought STIG B back to our feet. Actually, a little further from our feet this time, but deliberately. On STIG B-I the touchdown point was too close for comfort so we had moved the designated landing point a few meters further away. She still landed less than one minute's slow stroll from launch control.
The problem was one that we had discussed and dismissed. During the descent phase under main, residual propellants are dumped to lighten the landing load and get rid of combustion hazards.
For a nominal mission, the engine has had more than sufficient time to cool down and we can safely dump the propellants. One option of dumping first LOX and then fuel is not possible because of our linked valve arrangement. The MCO and the MPF valve pairs are each driven by a single actuator to avoid the potential for an improper O/F ratio.
However, in the case of premature termination of boost, the engine can still be hot enough to ignite the propellants. When the ALC attempted to dump propellants during the descent phase of this mission, there was an ignition event terminated by the main flight computer as soon as it sensed there was pressure being generated in the chamber. After a reasonable delay, the ALC again commenced to dump propellants and this time it did so without igniting.
After several seconds of dumping propellants, the propellants did ignite resulting in the destruction of the engine chamber and the fin can. These components fell to the ground within a very narrow debris field and the residual propellants dumped without further incident from open lines.
It is obvious that the ignition event was not caused by a hot engine chamber because liquid oxygen and fuel had been running through it for several seconds before the ignition event. We reasoned that the ignition was caused by an ignition source external to the engine. This was perhaps, a piece of glowing insulation material or smoldering adhesive. The net result though was a hard start which resulted in the destruction of the engine and fin can.
Following this incident, we decided to install propellant dump lines that dump overboard rather than through the engine. This adds another two solenoid valves and additional plumbing in an already crowded fin can, but will mitigate this failure mode on future missions.




As previously noted, the recovery thereafter was nominal. The Wamore guidance system, given the opportunity, does an outstanding job of returning the vehicle to the launch area. Although this technology is quite mature and used extensively by the military, to the best of our knowledge this is the first time that it has been applied to the recovery of a fully reusable sounding rocket. The original driver behind the decision to use this technology was a requirement by NASA's Flight Opportunities Program for the reusable launch vehicles to land within 1 km of takeoff point. This requirement was later dropped by NASA but in retrospect it has added to the operational capabilities of the STIG vehicle.
The landing was certainly the gentlest that we have seen to date (see launch & recovery video) as a result of the Wamore recovery system flaring the parachute at precisely the right time. As the bottom of the rocket touched the ground, it quite literally stood there like a telephone pole for a couple of seconds before lying down gently on the ground. The landing point this time was about half the distance from launch control to the launch pad. This certainly beats trudging through the New Mexico desert for several kilometers to recover a vehicle that has drifted with the wind down range.
We still have to trek after the nose cone and ballute, but they have their own GPS locator beacon and we typically are able to drive straight to them. The flight hazard area has been chosen such that, even in the worst-case wind conditions, the nose cone and ballute will land less than 15 km down range. Under more nominal wind conditions, they will typically land within 7 km.
The team was understandably disappointed that we had not achieved the full duration burn and maximum apogee, but again, there were several noteworthy achievements. This was our second licensed launch from Spaceport America, the flight safety system operated as designed, the recovery system delivered the vehicle to our feet despite the adverse conditions at deployment and, although we have to rebuild the fin can and engine, STIG B will fly for a third time. Had we not experienced the hard start, we felt confident that we would've been able to fly again within hours.
Obviously, rebuilding the fin can and engine would be the largest task that we had to undertake. We also wanted to design and implement the overboard propellant dump system and investigate the gain factors that would have led to a premature termination of the mission had not the dry line sensor done so beforehand. We also needed to modify that dry line sensor so that it would not give a false positive during the boost phase.
|









